 CN
CN EN
EN DE
DE JP
JP


产品知识
OPT小讲堂 ∣ Smart图像增强之滤波
什么是图像增强?
简单的说,图像增强是指针对给定图像的应用场合,有目的地强调图像的整体或局部特性,例如边缘、轮廓、对比度等,将原来不清晰的图像变得清晰;或强调某些感兴趣的特征,扩大图像中不同物体特征之间的差别;又或是抑制不感兴趣的特征,使图像质量改善、丰富信息量,加强图像判读识别效果,满足软件在项目实施中多样化的应用需要。
打开Smart,在主界面右下方工具箱栏点击图像增强的图标。在图像增强功能列表中可以看到,除滤波外,还有预处理、二值化、通道提取、形态学、直方图均衡化等功能,如图1。
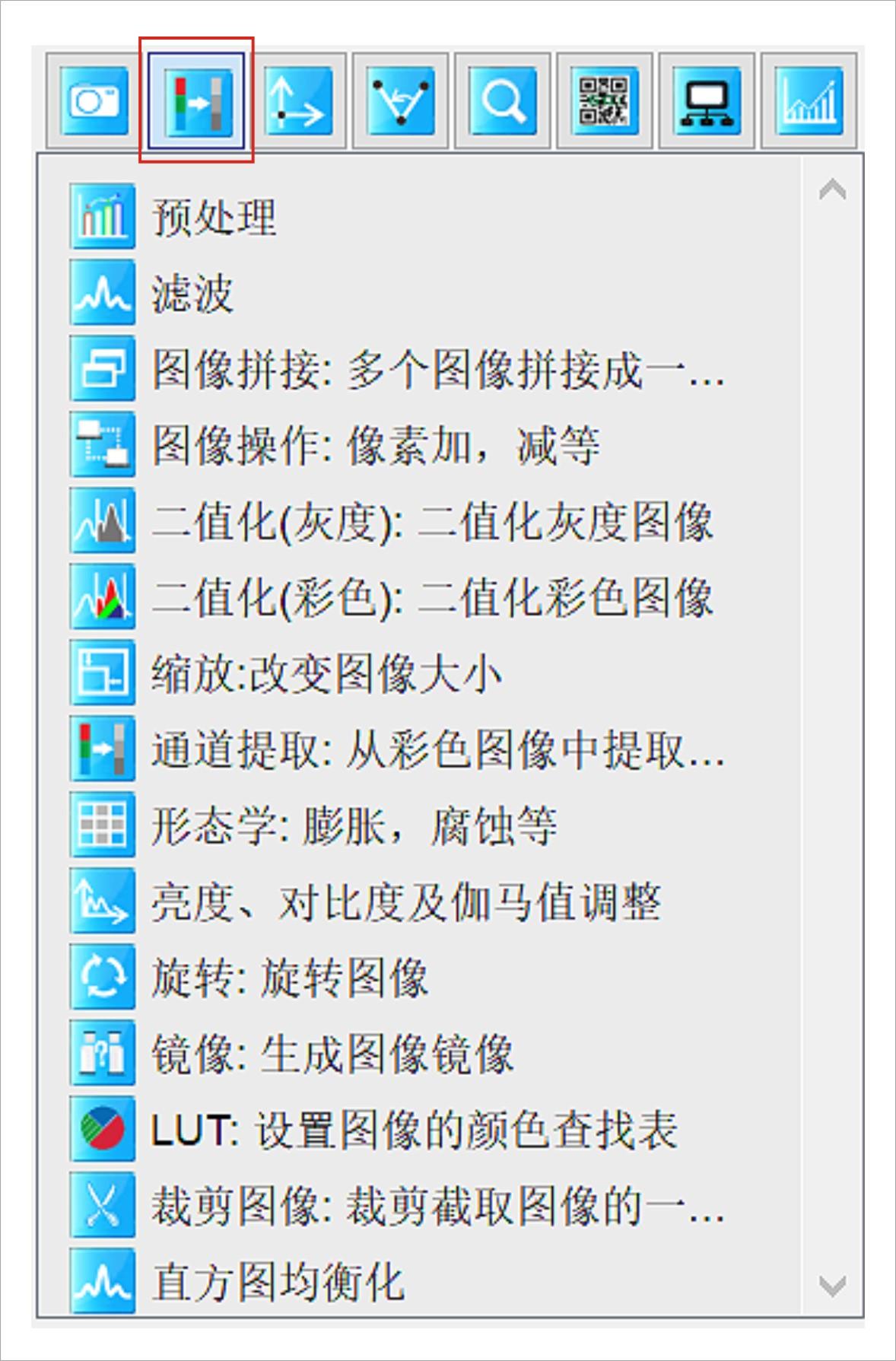
图1 图像增强工具箱
什么是滤波?
滤波简单理解就是对图像中的噪声信号进行抑制,并且保证图像的细节不被破坏的过程。
图像在其成像、传输和描述等过程中往往会受到多种信号的干扰而产生噪声,噪声在图像上常表现为视觉效果较强的孤立像素点或像素块。数字图像处理中常用滤波处理这样的图像。
滤波的原理是什么?
滤波通常是图像卷积的过程,具体来说,就是将滤波核的中心逐个覆盖原图中的像素点,然后和它邻域内的像素进行卷积求和。
一、滤波的参数设置
Smart智能视觉软件中滤波算子界面用于选择滤波器和调节滤波参数,如图2。
1、选择滤波方法:可点击下拉框,选择不同的滤波算法。
2、滤波核大小:滤波核尺寸,范围是[3, 99],步进值为2。滤波核尺寸越大,滤波效果越明显。
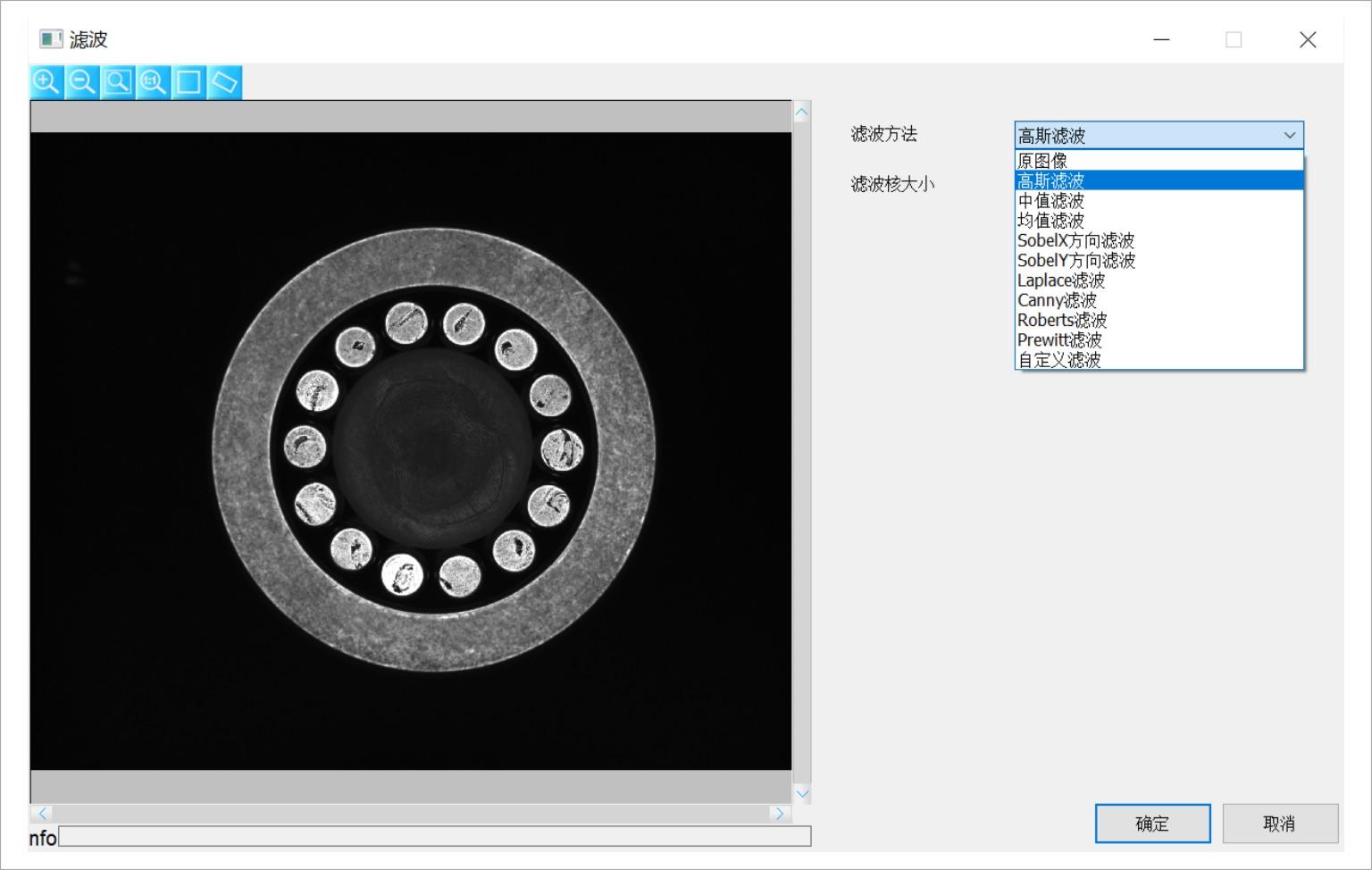
图2 滤波算子界面
二、平滑滤波
根据功能的不同,滤波分为平滑滤波、锐化滤波以及自定义滤波。
平滑滤波主要用于平滑图像,去除噪点,也就是滤掉图像的高频部分。根据选取滤波核的不同,平滑滤波又可分为均值滤波、高斯滤波以及中值滤波等。
1、均值滤波
均值滤波是一种典型的线性滤波算法。对目标像素给出一个滤波核,该滤波核覆盖其周围的像素,但不含目标像素本身,再用核中全部像素的平均灰度值代替目标像素的灰度值。均值滤波在去除噪声的同时,会对图像的边缘轮廓产生模糊效果。
2、高斯滤波
高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。
高斯滤波的具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值,去替代模板中心像素点的值。
3、中值滤波
中值滤波是一种非线性滤波算法。定义一个滤波核,取出滤波核所对应像素点的灰度值的中值,然后用灰度值的中值替代核中心点对应像素点的灰度值。以这样的方法遍历整张图像,可以有效去除噪声点,且对图像的边缘轮廓、细节影响较小。
均值滤波、高斯滤波、中值滤波的效果对比如图3。
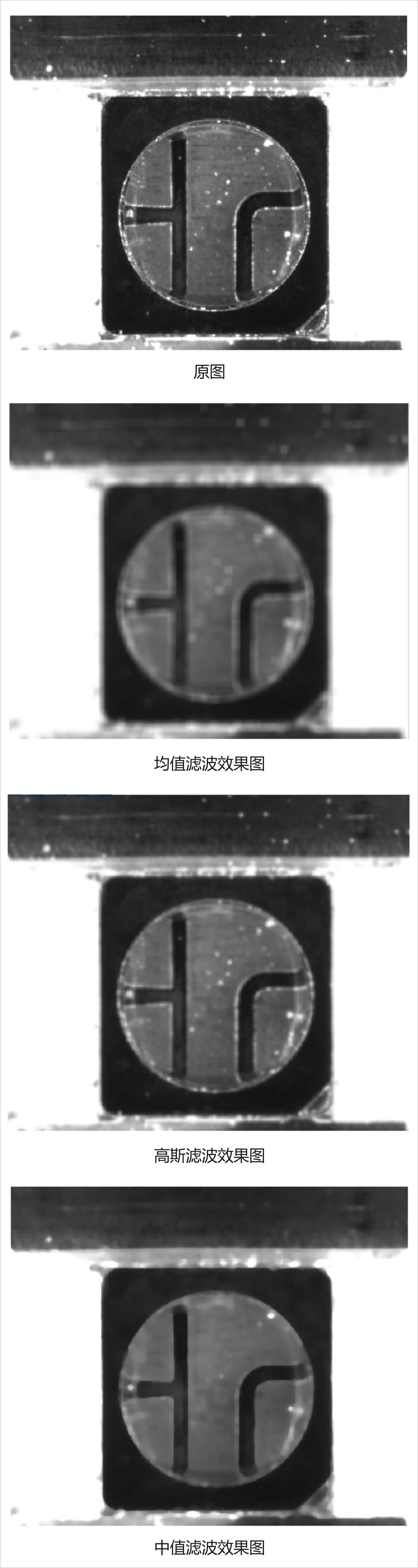
图3 三种平滑滤波效果对比
4、平滑滤波各算法特点对比
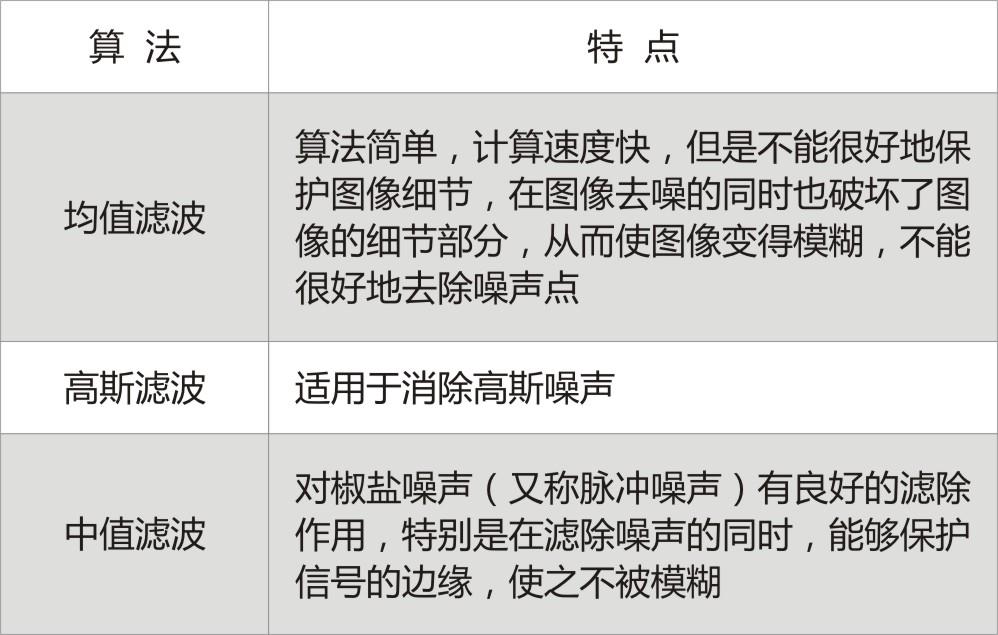
表1 平滑滤波各算法对比
三、锐化滤波
锐化滤波正好与平滑滤波相反,锐化滤波常用于增强被模糊的细节或目标的边缘,强化图像的细节。锐化滤波包括了Sobel滤波、Laplace滤波、Canny滤波、Roberts滤波以及Prewitt滤波等。
1、Sobel滤波
Sobel滤波包含两组3*3的矩阵,分别为横向及纵向,通过矩阵与像素灰度值进行卷积,即可分别得出横向及纵向的差分近似值,Sobel核矩阵如下:
Gx、Gy为卷积值,是滤波后的对应像素的灰度值;A为滤波前Sobel核对应的像素点的灰度值。Sobel滤波的结果是突出图像的轮廓,轮廓高亮显示,而在轮廓两边图像明显变暗,效果对比如图4。
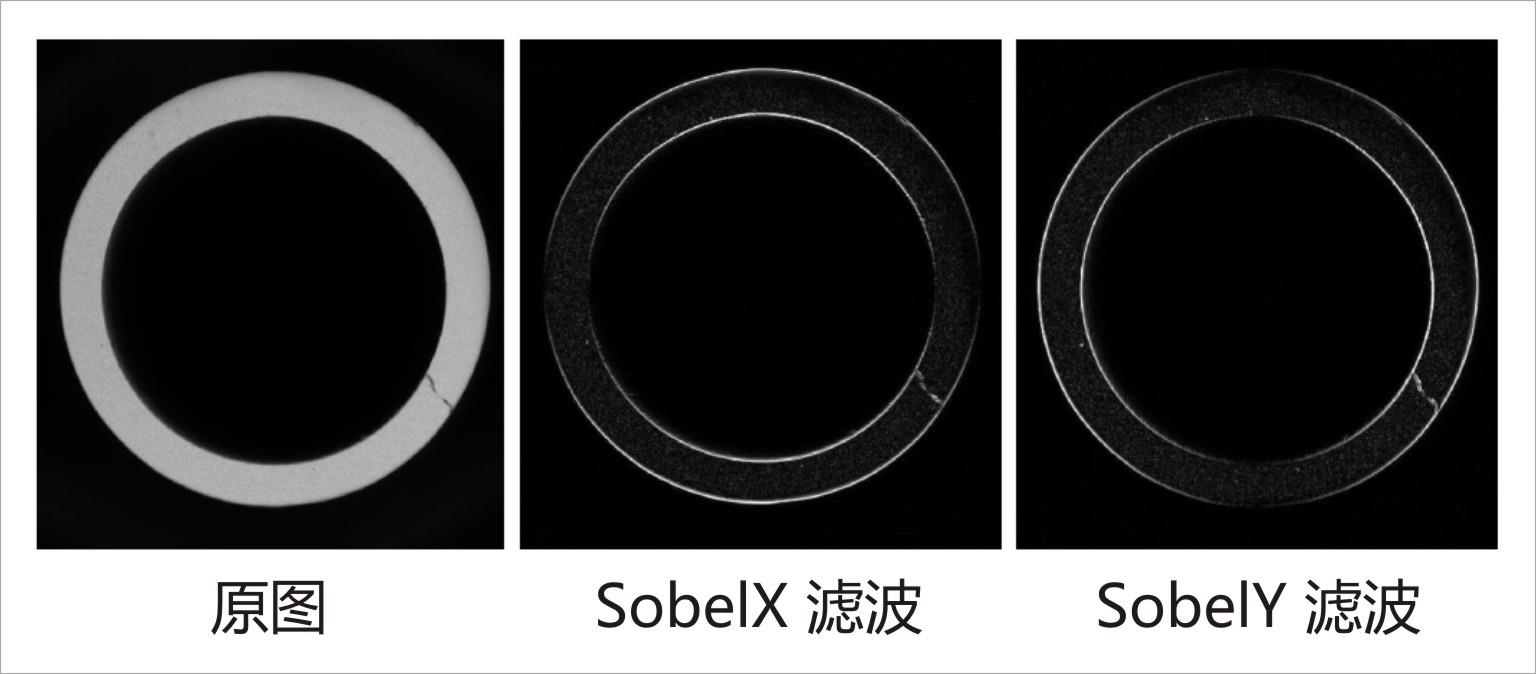
图4 Sobel滤波效果图
2、Laplace滤波
Laplace滤波,也叫拉普拉斯滤波,是一种高通滤波器,主要是通过增强图像中的高频信息分量(图像边缘、轮廓等灰度值变化较大的部分属于高频分量,灰度值变化相对缓慢的中间部分则属于低频分量),以实现图像的锐化,从而达到增强图像边缘和轮廓的效果,效果对比如图5。
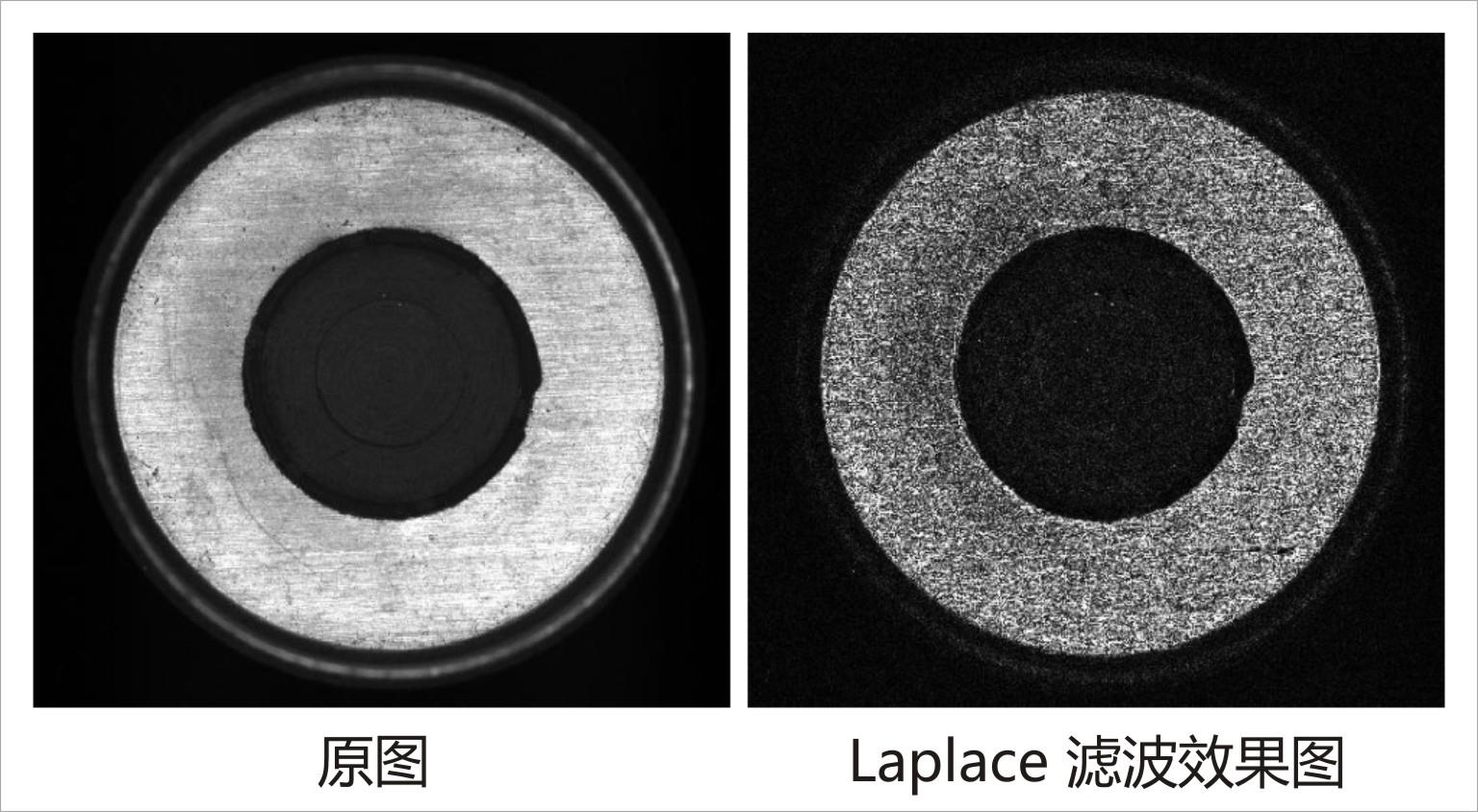
图5 Laplace滤波效果示意图
3、Canny滤波
Canny滤波是一种常用的边缘检测算子,它使用离散化梯度逼近函数,根据二维灰度矩阵梯度向量,来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘。Canny滤波分为三个步骤:去噪声,即对原始的图像进行一个高斯滤波;寻找图像中的亮度梯度,从原始图像上生成每个点灰度梯度图以及灰度梯度的方向;在图像中跟踪边缘,以此边缘片段为连续的曲线。Canny滤波的效果如图6。
图6 Canny滤波效果示意图
4、Roberts滤波
Roberts滤波定义一个2*2的模板,利用局部差分算子寻找边缘。其采用对角线方向相邻两个像素之差近似梯度幅值检测边缘。检测垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感,无法抑制噪声的影响。效果对比如图7。
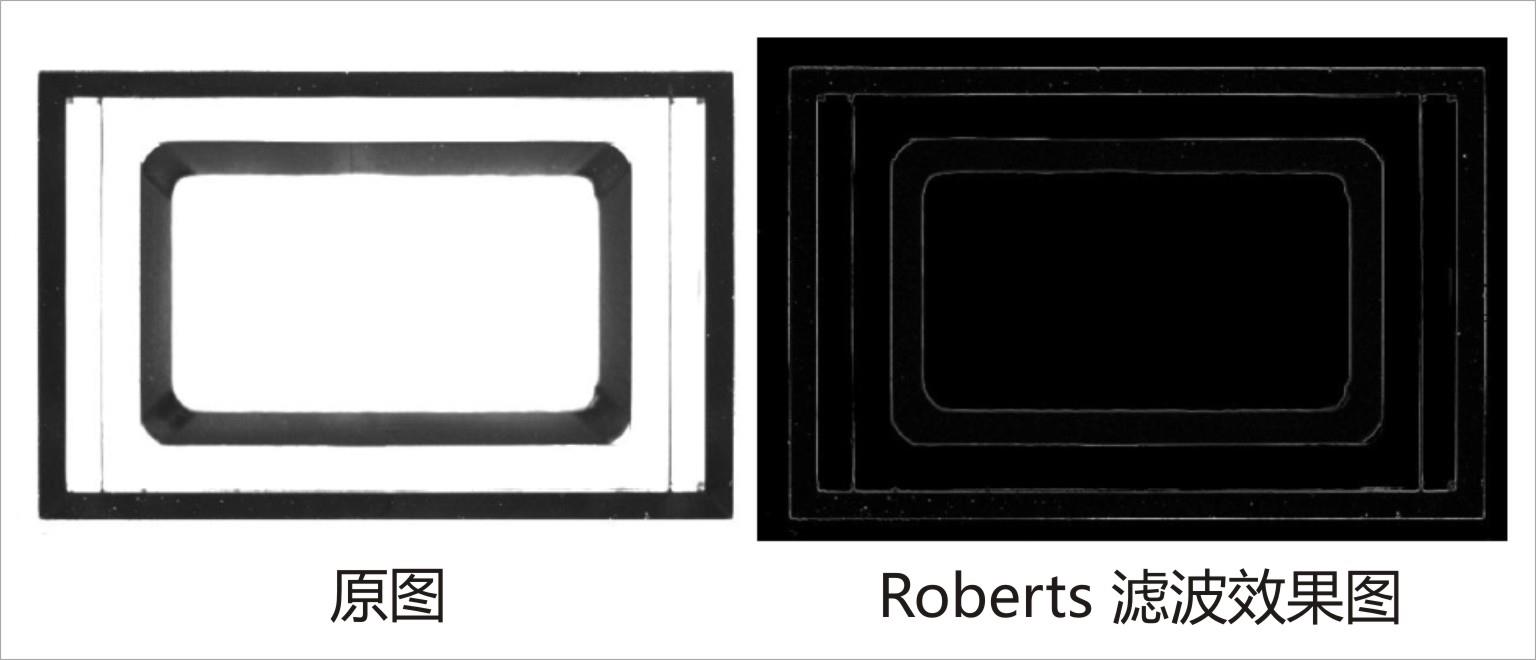
图7 Roberts滤波效果示意图
5、Prewitt滤波
Prewitt滤波是一种一阶微分算子,利用像素点上下、左右相邻点的灰度值差,在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用。其原理是在图像空间利用两个方向模板与图像进行邻域卷积来完成的,其效果如图8。
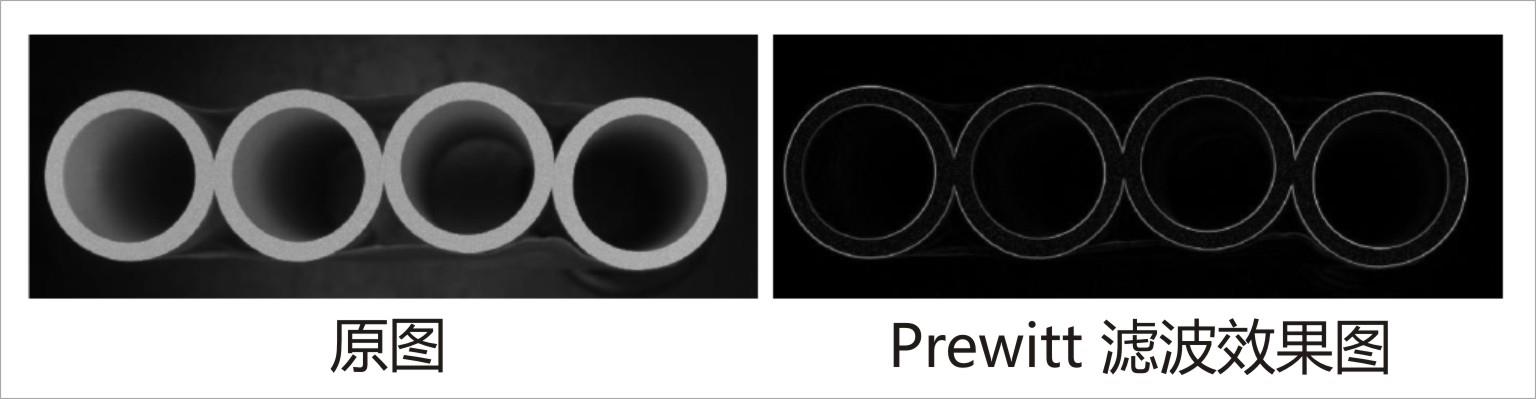
图8 Prewitt滤波效果示意图
6、锐化滤波各算法特点对比
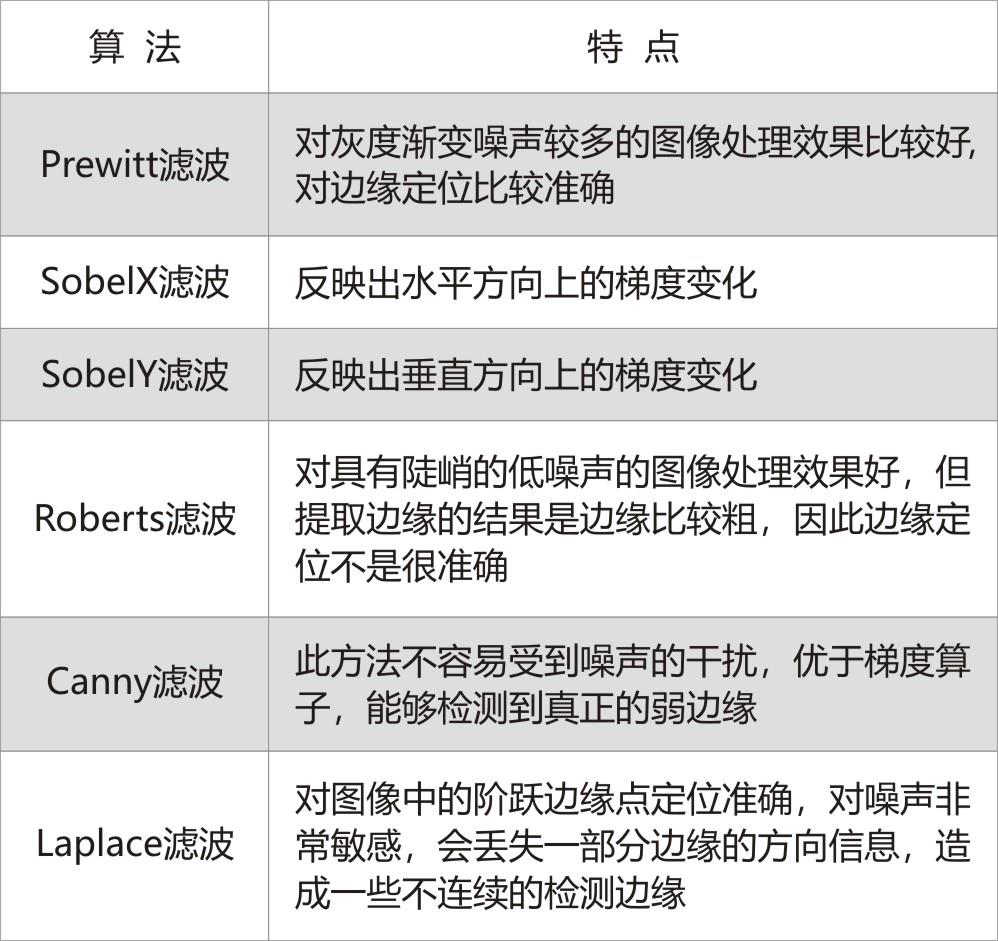
表2 锐化滤波各算法对比
四、自定义滤波
自定义滤波是将源图像与滤波核进行卷积。用户可以自己设定滤波核的大小,设定滤波核内的算法内容,实现灵活多变的滤波效果。设置界面如图9所示。
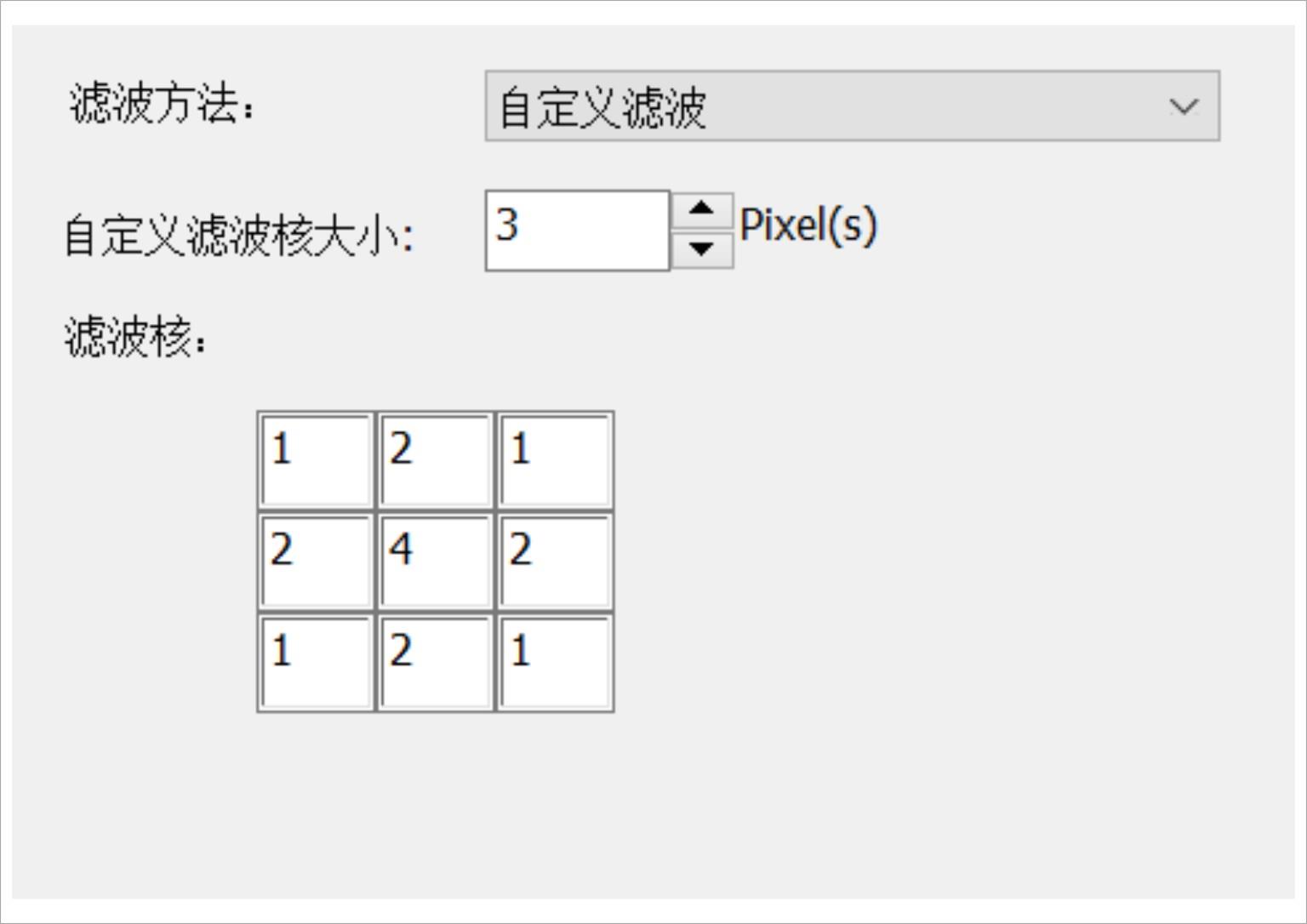
图9 自定义滤波参数设置
例如,定义3*3的滤波核尺寸算法内容设为:
滤波效果如图10。
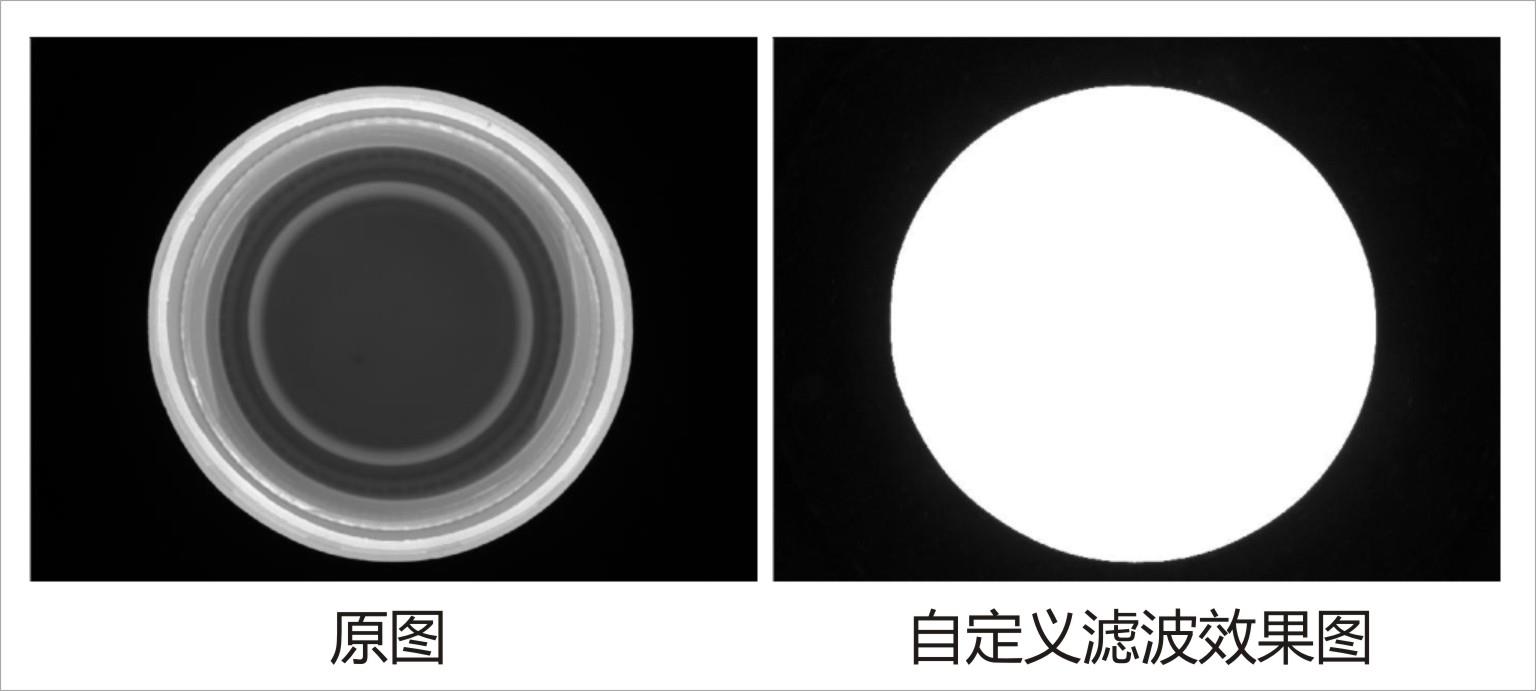
图10 自定义滤波效果示意图
以上为OPT小讲堂之Smart智能视觉软件操作培训第四课内容,如有任何问题欢迎在留言区留言或来电咨询,全国服务热线400-0769-068。






 手机请直接输入:
手机请直接输入: 座机前加区号:+86-0769-82716188-251
座机前加区号:+86-0769-82716188-251



